《Computer Graphics from Scratch》学习笔记——光线追踪器
为了更好地绘画,为了能扩宽职业方向(技术美术),学点计算机图形学是很必要的。
想要在屏幕中展示 3d 图形,归根结底有两种方式:光栅化和光线追踪,这里跟随此书步调,从光线追踪技术开始计算机图形学的学习。下面的描述中,均使用左手坐标系(大拇指指向自己,食指指向上方,此时大拇指,食指,中指分别为 x,y,z),并且镜头位置固定在(0, 0, 0),且指向 z 轴正方向,上方为 y 轴正方向(关于任意位置和角度的镜头的算法,待学习光栅化时再学习)。
从 canvas 到 viewport
首先是 canvas 和 viewport 的概念,为什么同时需要 canvas 和 viewport 这两个抽象?因为 canvas 对应显示屏或应用的窗口,它的单位是像素,是离散的,viewport 是 3d 坐标系下的一个面(或许不是平面),它的单位是真实世界单位比如米,它是连续的,考虑到 viewport 和 canvas 的量纲的差别,他们的比例也可以有不同,viewport 甚至可以不是平面…将它们做区分是有理由的。
算法的第一步是根据 canvas 的像素去找到 viewport 的对应位置(为什么不是从 viewport 开始?因为 viewport 是连续的,而且可能会有多个 viewport 上的点会对应到 canvas 上同一个像素,这时候如何确认这个像素使用哪个点?),考虑到当前的 canvas 和 viewport 均是矩形,做映射是容易的,下面是各变量及意义,及相关映射的方程:
1 | |
直线的表示法
直到绘制像素点之前,后面的步骤不再需要使用 canvas 了。第二步需要做相机到该位置的射线(这和实际光线的运动方式是相反的,但实现起来更容易),这需要对射线建模,假设相机位置为 O,viewport 上的点为 V,则从 O 到 V 的向量为 V-O,直线上任何一点 P 可以表示为:
1 | |
在这里,V-O 的大小显然是可以任意放缩的,这里令 V-O=D,则有:
1 | |
检查直线和球体相交
第三步是检查射线是否和球体相交,方法如下:
假设球的球心为 C,半径为 r,则球上任意一点 P 满足:
1 | |
即:
1 | |
即:
1 | |
这里要求 P 也在射线上,带入 P = O + tD,同时令 O - C = CO:
1 | |
点乘满足分配律,即 (a + b, c) = ac + bc,应用此,得到:
1 | |
再次应用,得到:
1 | |
点乘满足交换律,即 (a, b) = (b, a),且满足 (ta, b) = t(a, b) = (a, tb),带入得到:
1 | |
可以看到,这是一个一元二次方程,且 D,CO,r 均已知,可以据此求出结果方程:
1 | |
能够意识到,只消允许 O 为任意点,可以求出任意射线和任意球体的交线。
可以发现这里使用的完全是向量,没有将它解构成坐标。代码实现如下,这里返回 t 而非具体的交点,因为 t 可以用来判断点是在 viewport 前还是在 viewport 后:
1 | |
渲染
剩下的逻辑就简单了,做射线后,找到和每个球的交点,找到最近的且在 viewport 外的交点,找到对应的球,渲染它的颜色,总的实现使用伪代码表示就是:
1 | |
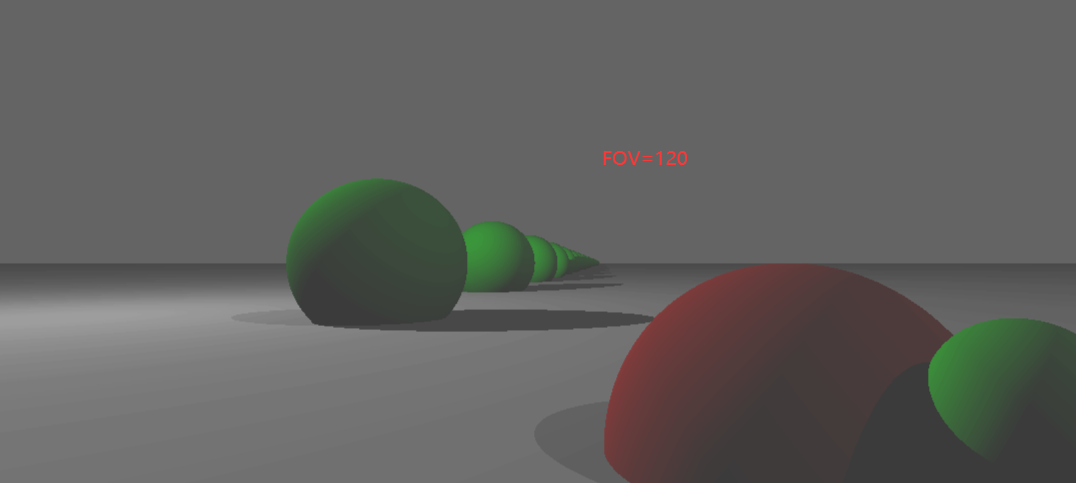
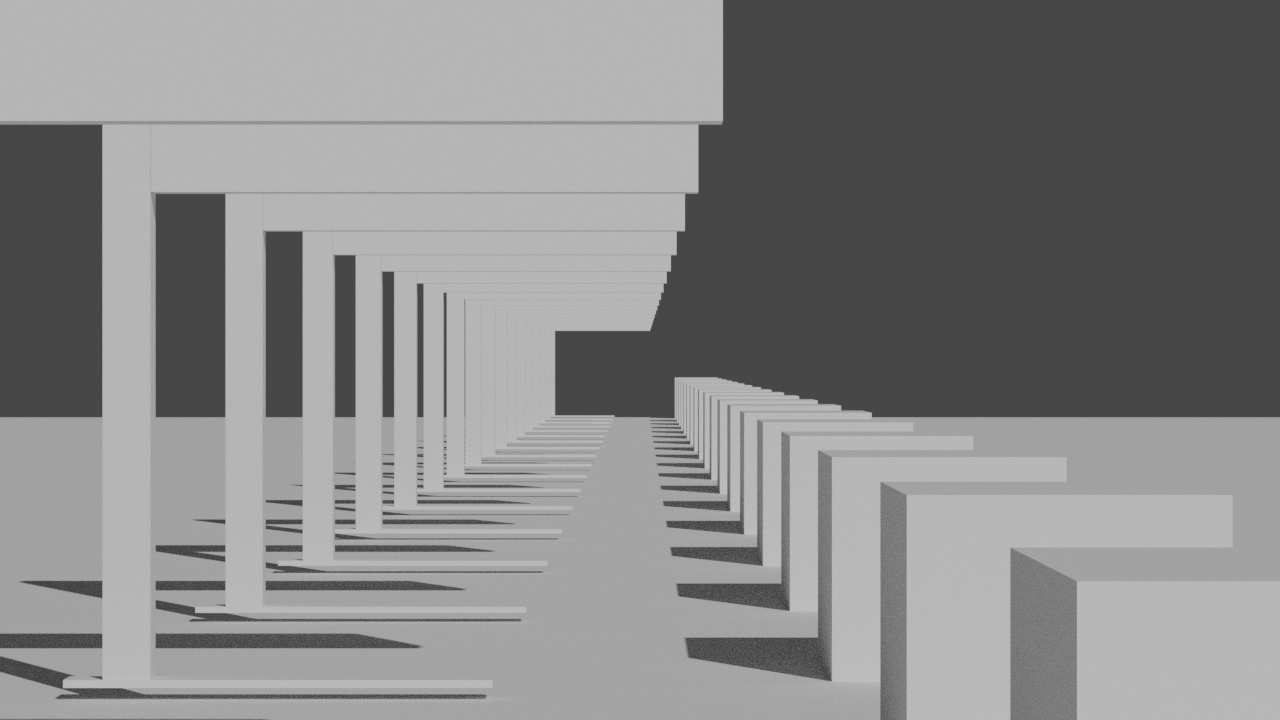
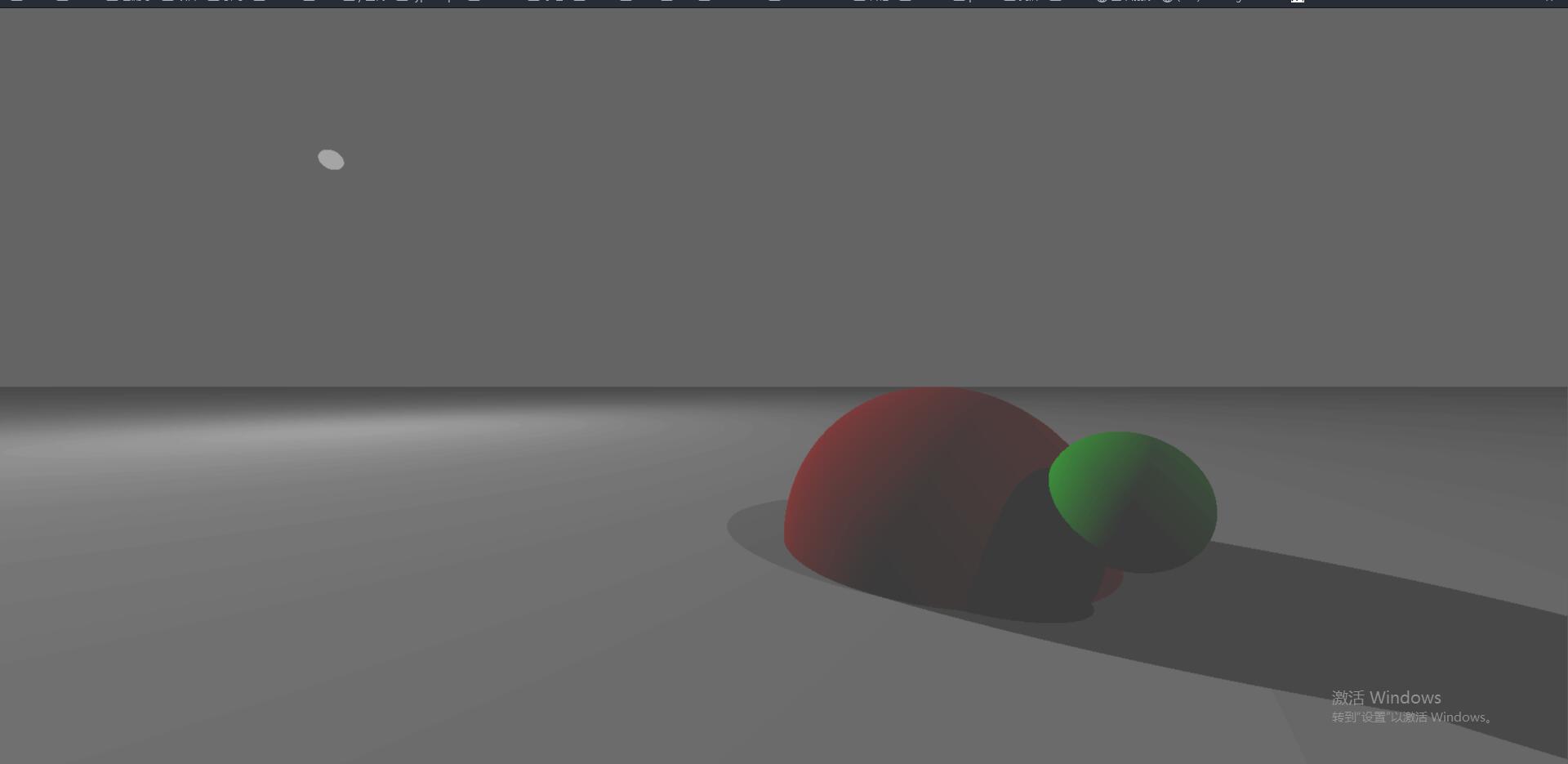
最后的效果就像一张二维图片,因为这个世界没有光(更实际地说,是只有白色的泛光),因此物体只有固有色,没有立体感,下一步是定义光源的概念,对每一个位置,将物体的固有色乘以此处光源强度得到此处颜色。
注意处在画面边缘的球体的畸变,这个非常有意思。
透视
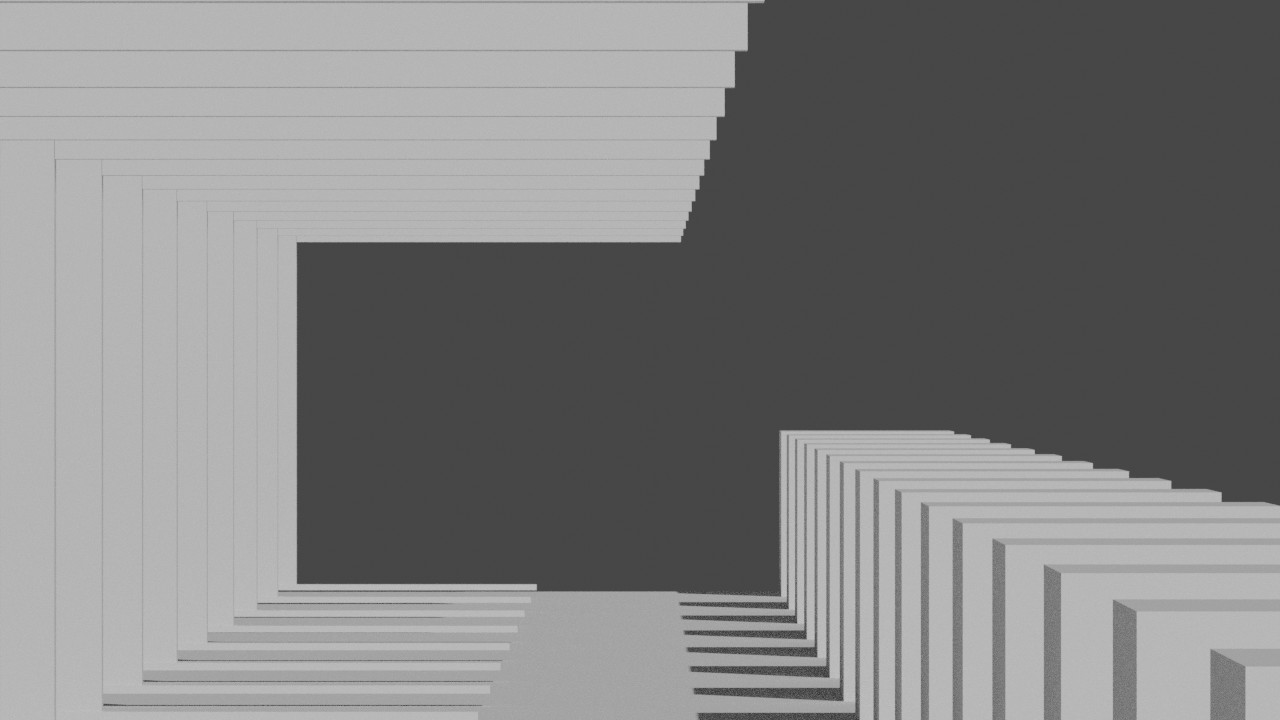
物体在画面中所占的大小,就是物体向镜头方向在 viewport 上的投影的大小。这种抽象可以自动地表达平放的六面体的一点,二点透视;三点透视需要能够修改镜头的俯仰角。
首先是一点透视,六面体若有一个面平行于 viewport,则它是一点透视的,它的特性是如果这个六面体在平行于 viewport 的这个面上竖直方向移动,则水平方向的线的长度是固定的,竖直方向会有透视;水平方向移动则反之。这是很不符合直觉的,甚至如果是球体,则竖直移动时,竖直方向会变得更长,最后简直像纺锤形了,但可以通过平面作图证明这一点。
二点透视发生在六面体没有面平行于 viewport,但有线平行于 viewport,后面不表了。
四点,五点透视需要 viewport 非平面。
焦距,视场角
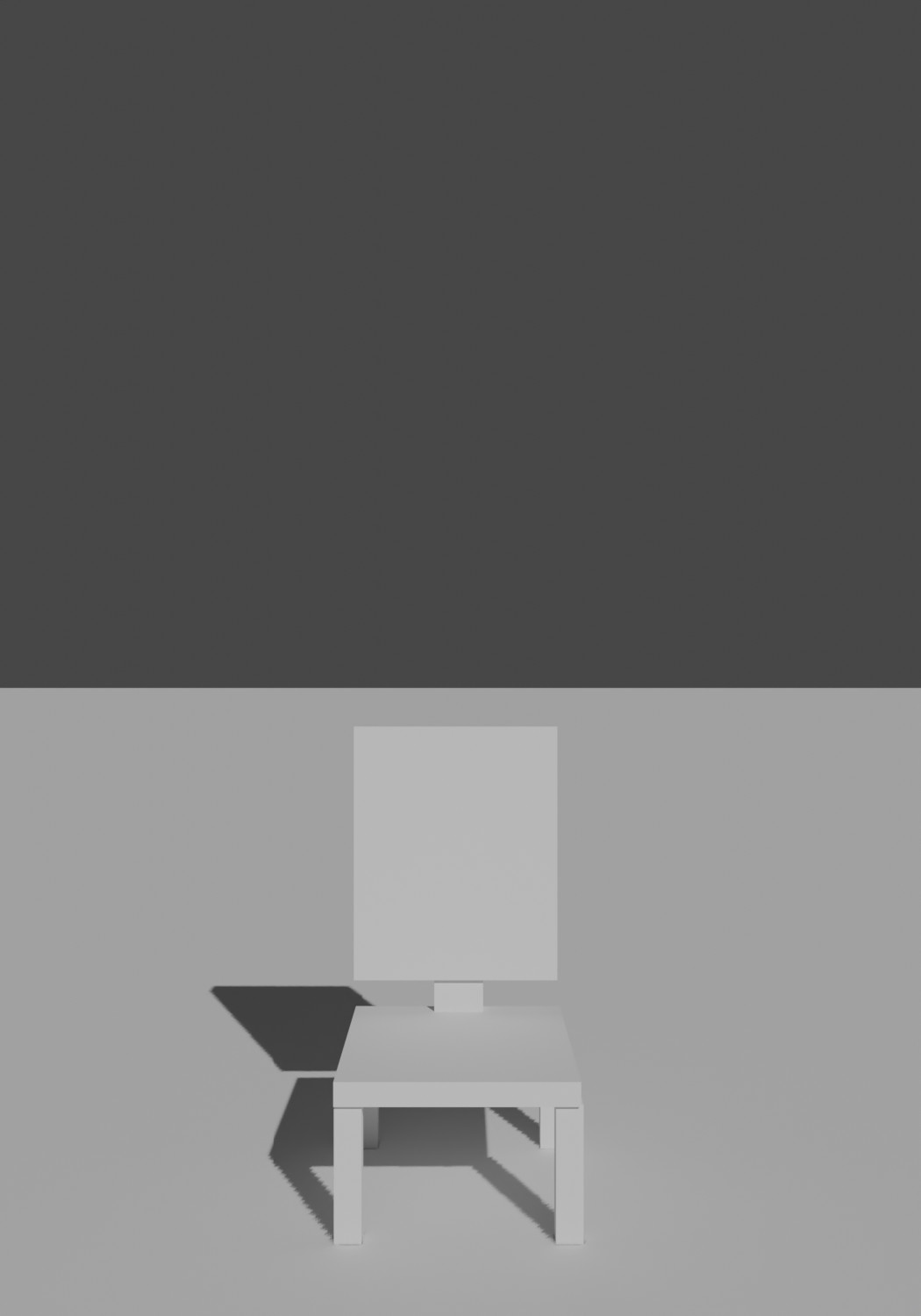
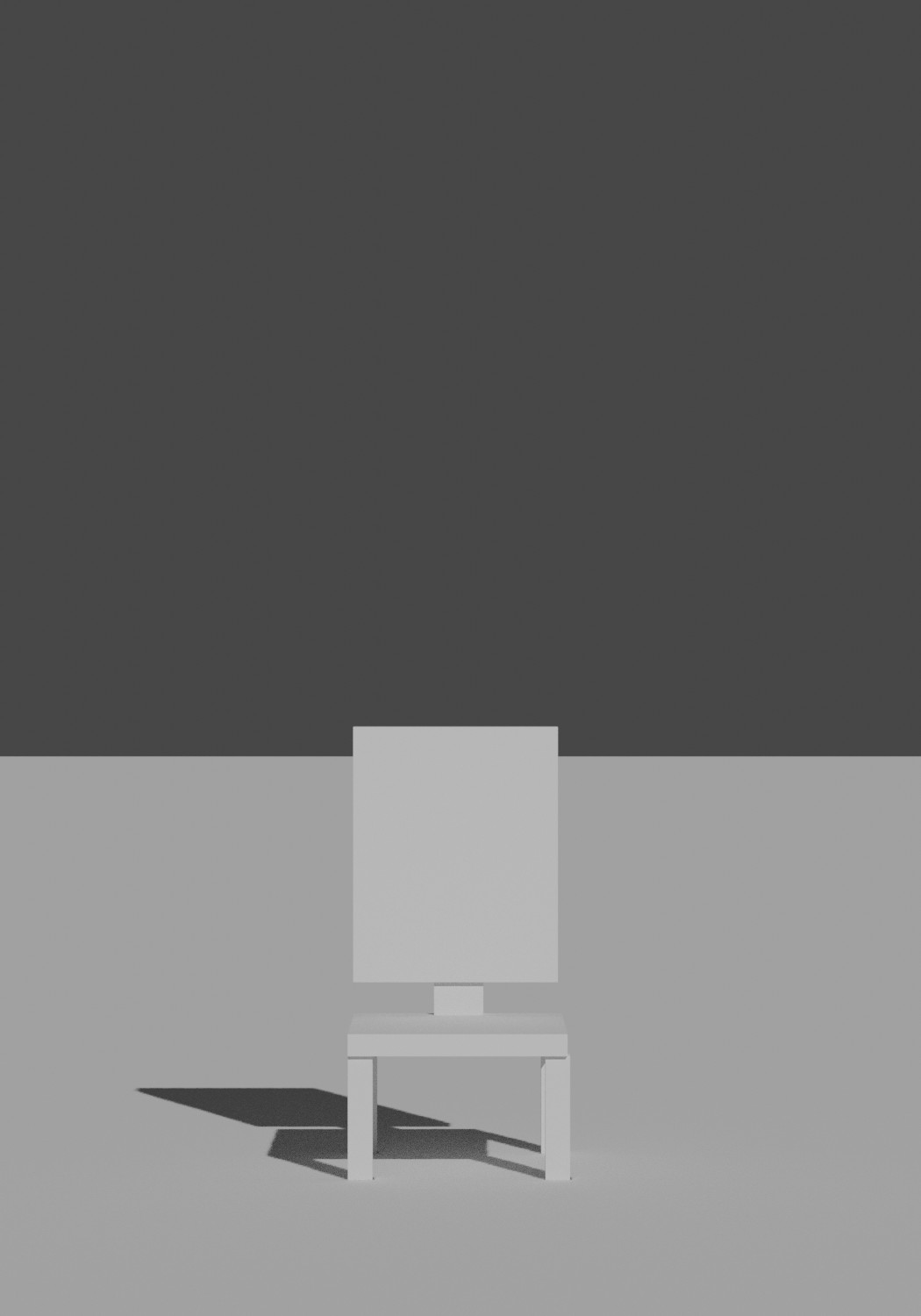
FOV,视场角,它是水平方向的视野范围,单位是度,可以使用 FOV 和 D(viewport 和镜头的距离)来计算 viewport 的长宽:
1 | |
FOV 和镜头的焦距成反比,短焦镜头的 FOV 大,能看到更多内容,空间变形幅度大,长焦镜头 FOV 小,看到内容更少,空间会有种压缩感,近大远小不明显,下面是 FOV 不同时的例子:
这点可以利用到画画中,只需要调整远离镜头的线的长度,便能够表现出不同的镜头感。
光
可以简单定义三种光源:点光(如灯泡),直射光(如太阳,镭射灯),环境光(天光,暗面的反射光),为了简单起见,光均是白光,因此只需要一个维度 i:intensity 表示亮度(色光用 3 个维度 rgb);不考虑大气透视。
对场景中任意点为 P,光线到 P 点的向量 L(大小任意,因为没有大气透视),则对点光,光源为 Q,L = Q - P;对直射光,L 直接给定;反射光是光在其它物体上的反射所造成,为此,我们需要让每个物体都成为光源,这复杂过了头,对其的抽象则是所谓的环境光,它对每个点都施加同样的亮度,这又简化过了头(就像古早的 3d 游戏),但不是不能用。一个场景只能有一个环境光(不同环境光可以直接组合),可以有任意点光和直射光,任意点上的光量为所有光在该处光量的和(现实如此)。
光打到物体后,物体的反射光打到眼睛里,我们才能看到物体;物体反射光的能力书中将它们分为 matte 和 shiny,这里把他们称为调子和高光。任何物体都一定会既有调子也有高光,无论是石膏还是金属,只不过高光的程度各有差异罢了。
一般来说,对特定物体,光打到它后会均匀向各个方向反射,因此从各个角度看来,它的特定位置的亮度是一样的,不随人的视线方向为转移;这时候。特定位置的亮度就取决于光和物体表面的夹角了,垂直于光的部分亮度最高,夹角越小,单位面积就会接受越少的光,亮度就越小。
假设单位光强度为 I,光打到的面积为 A,则此时的单位面积上的光强度为 kI/A;规定当 I 垂直于点所在平面的时候,kI/A=1,问题就变成,光和点的法线呈一个角度 a 的时候,此时的 kI/A 的值是什么?只从二维来看,把 A 当成线段的长度的话,在某角度 a 下,kI/A = cos(a),假设平面的法向量为 N,光向量为 L,根据点乘规律 (N, L) = |N||L|cos(a),就可以求得 cos(a) 了。对某个点,我们只需要计算面在该点上的法向量,然后对每一个光源获取它在该点处的光强度,将所有结果加和即可,即下面的公式:
1 | |
上面当 (N, L0) 小于 0 的时候需要返回 0,此时为物体在光线的背部。
我不懂微积分,不知道这种推导过程是否正确,但最后效果不错就好。
需要注意的是,I 的上限是无限的,我们需要做好“曝光”,这里简单要求所有光源 intensity 的和极限为 1.0,然后对于某点的颜色,直接用总的 intensity 乘以球体的固有色 rgb 即可;这效果会非常土就是了……
阴影
上面的算法没有考虑阴影,但加入阴影也是简单的。只需要在计算某点来自特定光源的I的时候,检查该点和光源之间是否有其它物体存在即可。遍历物体时第一想法是把当前物体排除掉(不然会得到 t=0 的结果),这在只有球体的情况下还算可用,但无法处理复杂物体自己遮挡自己的情况(比如用手在眼睛上挡住太阳),考虑将出发点的位置从该点往外偏移一些,或者限制一下t的值。
高光
少女祈祷中……
反射
核心是递归操作——第一趟是做镜头到viewport上某点的射线,检查对所有物体的交点,第二趟就是从交点开始,按反射的方向去做射线,不断递归,直到什么物体都没打到,或者达到设计的反射次数的上限(一般3次就足够了)。
少女祈祷中……
本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 协议 ,转载请注明出处!